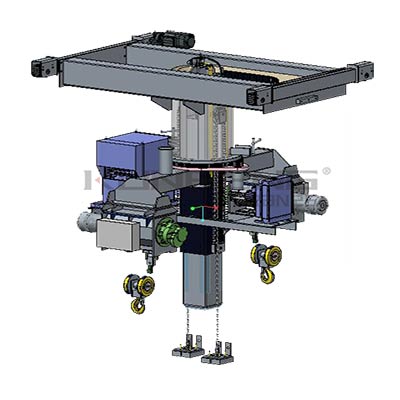
机器人第七轴系统主要功能描述:
1. 机械手移动小车移动与定位
机器人第七轴承机械手移动小车在直线方向上的移动与定位可通过操作面板及显示屏直接编辑,理论上在直线轴有效行程范围内,可以设置无数个定位点。位置精度由编码器精确检测,通过伺服系统控制电机保证,重复定位精度在±0.06mm范围之内。
移动速度在0~30m/min范围内根据操作要求任意设置。
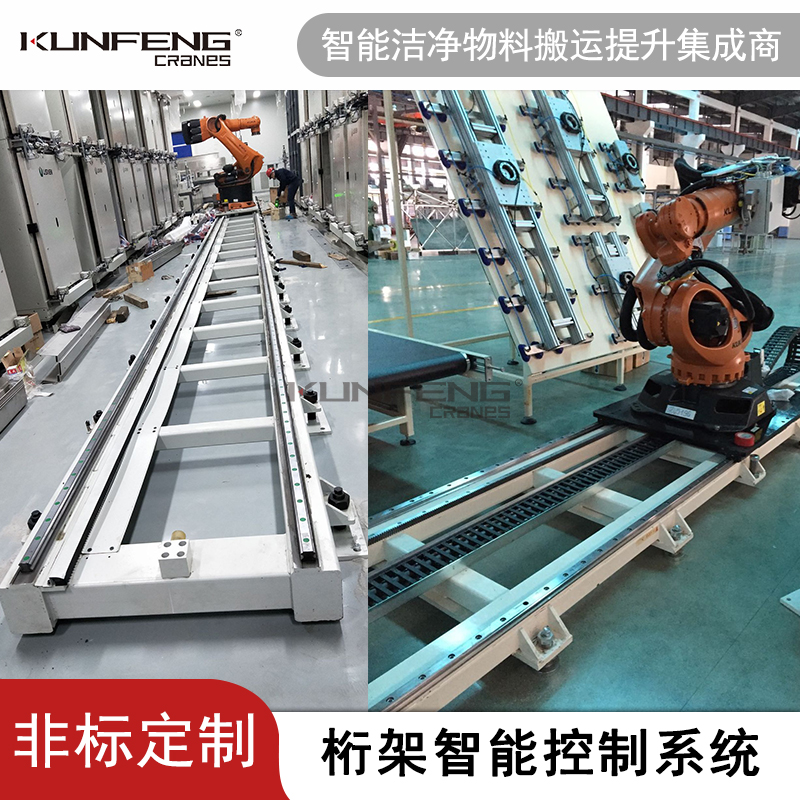
2. 系统程序控制
机器人第七轴系统与“机器人”的信号接口及“机床”系统接口全部采用数字信号传输,从而保证相互之间的稳定性及可靠性。具备手动和自动两种运行控制方式;手动方式下可单独操作某一个工位;自动方式下按设定的运行程序自动运行。
3. 安全保护
外用钥匙保护开关:当某个模架不用时(如:某个模架出现故障需维修),采用外用钥匙保护开关跳过此模架,这样不会因为人为的误操作或其他的意外而造成产品的报废。
急停按钮:每台模架具备在紧急情况时停止整个系统的急停按钮。
4、软件功能
实现工位无序浇注,即:随机激发浇注信号,七轴能够根据激发的先后顺序依次完成浇注工作;并且在信号复位后能够清除掉所有未执行的信号;急停连锁功能:随意激发任何一个急停按钮(发泡机及七轴、机器人),七轴能够立即中止正在完成的动作;只有在该急停重新复位后设备才能恢复正常运行;信号安全保护:在较短的时间内连续给出两次信号,七轴只执行一次信号而不会连续浇注两次;在程序升级后,有完整的系统备份。
5、接口
所有硬件接口和软件功能由供方与德国斯劳克玛非对接,保证所有需方需求。

微电子车间防摇摆行车,采用电子防摇摆技术,摇摆幅度控制在±5mm 内,专为半导体晶圆、玻璃基板等精密物料搬运设计,满足百级 / 千级洁净、低振动要求,昆峰提供定制化智能起重方案.

对于轨道起重机的使用,每个工作人员必须跟上他或她自己的位置并根据正确的操作控制方法使用它。

KFS行走轮箱整体结构设计合理紧凑,能够满足重载搬运要求,安装维护简单,与结构连接方,直径多样,性能优异,承载能力强。

无菌灌装车间洁净桥式起重机,专为食品和医药无菌环境设计,具备低产尘、防污染、易清洁特性,符合 GMP 和 ISO Class 5 洁净标准。运行平稳且低噪音,可精准搬运原料桶、反应器等物料,杜绝污染风险,为无菌灌装生产提供安全高效的起重解决方案。
地 址:江苏省昆山市长江北路335号宝裕广场105号楼1201室
手 机:180-5188-5167 (刘经理)
电 话:0512-36822106
网 址:https://changzhou.jiangsuqzj.com
邮 箱:vip@kfqizhongji.com